Selection Guide for Stepper Motors
Introduction
Stepper motors are widely used in various industries due to their precise control and high torque capabilities. However, selecting the right stepper motor for a particular application can be challenging, as there are many factors to consider, such as speed, accuracy, and environmental conditions. In this article, we provide a comprehensive guide to help you choose the best stepper motor for your specific needs, including an overview of different types of stepper motors and their characteristics, as well as key factors to consider when selecting a motor.
Stepper Motor Basics
A stepper motor is an electromechanical device which converts electrical pulses into discrete mechanical movements. The shaft or spindle of a stepper motor rotates in discrete step increments when electrical command pulses are applied to it in the proper sequence. The motors rotation has several direct relationships to the applied input pulses. The sequence of the applied pulses is directly related to the direction of motor shaft rotation. The speed of the motor shafts rotation is directly related to the frequency of the input pulses and the length of rotation is directly related to the number of input pulses applied.
Stepper Motor's Advantages and Limitations
Advantanges
- The rotation angle of the motor is proportional to the input pulses.
- The motor has full torque at standstill (if the windings are energised).
- Precise positioning and repeatability of movement since most stepper motors have an accuracy of 3 – 5% of a step and this error is non cumulative from one step to the next.
- Excellent response to starting, stopping and reversing.
- Extremely reliable since there are no contact brushes in the motor, therefore the life of the motor is mainly dependant on the life of the bearings.
- The motors response to digital input pulses provides open-loop control, making the system simpler and therefore more cost efficient.
- It is possible to achieve very low speed synchronous rotation with a load that is directly coupled to the shaft.
- A wide range of rotational speeds can be realised as the speed is proportional to the frequency of the input pulses.
Limitations
- Resonances can occur if not properly controlled.
- The motor is not easy to operate at extremely high speeds, e.g. 3000 rpm or over.
Overview on Stepper Motor Types
There are three basic stepper motor types. They are:
- Variable-reluctance
- Permanent-magnet
- Hybrid
Variable-reluctance (VR)
This type of stepper motor has been around for a long time. It is probably the easiest to understand from a structural point of view. This type of motor consists of a soft iron multi-toothed rotor and a wound stator. When the stator windings are energised with DC current, the poles become magnetised, rotation occurs when the rotor teeth are attracted to the energised stator poles.
Permanent magnet (PM)
Often referred to as a “Tin Can” or “Can Stack” motor, the permanent magnet stepper motor is a low cost and low resolution type motor with typical step angle of 7.5° to 15° (48 – 24 steps/revolution). PM motors as the name implies have permanent magnets added to the motor structure. The rotor no longer has teeth as with the VR motor, instead the rotor is magnetised with alternating north and south poles situated in a straight line parallel to the rotor shaft. These magnetised rotor poles provide an increased magnetic flux intensity and because of this the PM motor exhibits improved torque characteristics when compared with the VR type.
Hybrid (HB)
The hybrid stepper motor usually is more expensive than the PM stepper motor, but provides better performance with respect to step resolution, torque and speed. Typical step angle for the HB stepper motor ranges from 3.6° to 0.9° (100 – 400 steps per revolution). The hybrid stepper motor combines the best features of both the PM and VR type stepper motors. The rotor is multi-toothed like the VR motor and contains an axially magnetised concentric magnet around its shaft. The teeth on the rotor provide an even better path which helps guide the magnetic flux to preferred locations in the air gap. This further increases the detent, holding and dynamic torque characteristics of the motor when compared with both the VR and PM types. The Figure below shows a cross section of a typical hybrid stepper motor.
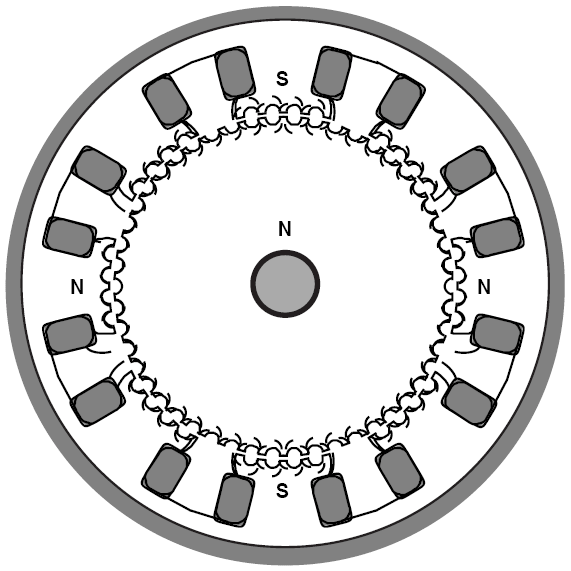
Figure 1: Cross-section of a Hybrid (HB) Stepper Motor
The two most commonly used types of stepper motors are the permanent magnet (PM) type and the hybrid type. Generally speaking, the hybrid stepper motor may be a better choice on the cost, as well as it offers better performance with respect to step resolution, torque and speed.
How to Select A Stepper Motor
A stepper motor can be a good choice whenever controlled movement is required. They can be used in applications where you need to control rotation angle, speed, position and synchronism. Because of the inherent advantages listed previously, stepper motors have found their place in many different applications. Some of these include printers, plotters, X-Y tables, laser cutters, engraving machines, pick-place devices and so on.
When selecting a stepper motor for your application, there are several factors that need to be taken into consideration:
- How will the motor be coupled to the load?
- How fast does the load need to move or accelerate?
- How much torque is required to move the load?
- What degree of accuracy is required when positioning the load?
Phases, Poles and Stepper Angles
Usually stepper motors have two phases, but three- and five-phase motors also exist. A bipolar motor with two phases has one winding/phase, and a unipolar motor has one winding with a center tap per phase. Sometimes the stepper motor is referred to as a “four-phase motor”, even though it only has two phases. The motors that have two separate windings per phase can be driven in either bipolar or unipolar mode.
A pole can be defined as one of the regions in a magnetised body where the magnetic flux density is concentrated. Both the rotor and the stator of a step motor have poles. The hybrid type stepper motor has a rotor with teeth. The rotor is split into two parts, separated by a permanent magnet-making half of the teeth south poles and half north poles. The number of pole pairs is equal to the number of teeth on one of the rotor halves. The stator of a hybrid motor also has teeth to build up a higher number of equivalent poles (smaller pole pitch, number of equivalent poles = 360/teeth pitch) compared to the main poles, on which the winding coils are wound. Usually 4 main poles are used for 3.6° hybrids and 8 for 1.8° and 0.9° types.
The following equation shows the relationship between the number of rotor poles, the equivalent stator poles, the number of phases and the full-step angle of a stepper motor.
Step Angle = 360/(NPh/Ph) = 360/N
- NPh = Number of equivalent poles per phase = number of rotor poles
- Ph = Number of phases
- N = Total number of poles for all phases together = NPh/Ph
If the rotor and stator tooth pitch is unequal, a more-complicated relationship exists.
Motor Size
In addition to being classified by their step angle, stepper motors are also classified according to frame sizes which correspond to the frame size of the motor. For instance, a NEMA size 11 stepper motor has a frame size of approximately 1.1 inches (28mm). Likewise a NEMA size 23 stepper motor has a frame size of 2.3 inches (57 mm), etc. However, the body length may vary from motor to motor within the same frame size classification. Generally speaking, the available torque of a particular frame size motor will increase with increased body length.
Motor Torque
The output torque and power from a stepper motor are functions of the motor size, motor heat sinking, working duty cycle, motor winding, and the type of drive used. If a stepper motor is operated no load over the entire frequency range, one or more natural oscillating resonance points may be detected, either audibly or by vibration sensors. The usable torque from the stepper motor can be drastically reduced by resonances. Operations at resonance frequencies should be avoided. External damping, added inertia, or a microstepping drive can be used to reduce the effect of resonance.
In a stepper motor, the torque is generated when the magnetic fluxes of the rotor and stator are displaced from each other. The magnetic flux intensity and consequently the torque are proportional to the number of winding turns and the current and inversely proportional to the length of the magnetic flux path. As rotation speed increases, the time taken for the current to rise becomes a significant proportion of the interval between step pulses. This reduces the average current level, so the torque will fall off at higher speeds.
Resolution and Positioning Accuracy
The resolution and positioning accuracy of a stepper motor system is affected by several factors-the stepper angle (the stepper motor full-step length), the selected drive mode (full-step, half-step or microstepping), and the gear rate. This means that there are several different combinations which can be used to get the desired resolution. Because of this, the resolution problem of a stepper design can normally be dealt with after the motor size and drive type have been established.
Summary: Step-By-Step Selection Guide
Step One: Determining the drive mechanism component
Determine the mechanism and required specifications. First, determine certain features of the design, such as mechanism, rough dimensions, distances moved, and positioning period.
Step Two: Calculate the required resolution
Find the resolution the motor requires. From the required resolution, determine whether a motor only or a geared motor is to be used. However, by using the microstepping technology, meeting the required resolution becomes very easy.
Step Three: Determine the operating pattern
Determine the operating pattern that fulfills the required specifications. Find the acceleration (deceleration) period and operating pulse speed in order to calculate the acceleration torque.
Step Four: Calculate the required torque
Calculate the load torque and acceleration torque and find the required torque demanded by the motor.
Step Five: Select the motor
Make a provisional selection of a motor based on the required torque. Determine the motor to be used from the speed-torque characteristics.
Step Six: Check the selected motor
Confirm the acceleration/deceleration rate and inertia ratio.
What's Next...
Now that you have a solid understanding on the process of selecting the right stepper motor for your specific application. For anyone who requires further review on stepper motor theory and operation, please refer to our technical guide Stepper Motors Demystified: A Comprehensive Guide to Understanding Stepper Motor Theory
Motion Control Products offer differnt types of stepper motors, such as 2-phase or 3-phase hybrid stepper motors (from NEMA frame size 8 to 42). Our stepper motors adopt advanced technology, using high-class cold roll sheet copper and anti-high temperature permanent magnet. Motion Control’s stepper motors are distinguished for their high reliability and low heating. Due to their internal damping characteristics, our stepper motors can run very smoothly and have no obvious oscillating area within the whole speed range of the motors. If you are looking for a stepper motor for your applications and needs, please visit our Stepper Motors page for more details.